| |
Teacher
Logbook:
Thursday, July 7, 2000 1600
hrs.
Location, location, location.
Not just a real estate clich. Out at sea there are no landmarks, so technology
plays a big part of determining one's position. There are two navigation
systems in operation for NeMO. The first one, GPS (Global Positioning
System), is used to determine the location of the ship. Every second at
least three satellite fixes are recorded and used by a computer to calculate
the ship's latitude and longitude, in much the same way that earthquakes
are triangulated by seismologists. With the cold war over, President Clinton
was instrumental in declassification of GPS data, improving the location
accuracy. Your position anywhere on the globe is now accurate within the
size of a tennis court, as opposed to a football field before declassification.
The second navigation system
locates the position of our ROV, ROPOS. The ROPOS pilot often flies through
the water where visibility is restricted to a few feet. Any time ROPOS
is in the water one of our navigators, Susan Merle, Julia Getsiv, or Lisa
Crowder are in the ROPOS control room continually updating the pilot on
the position of ROPOS and any cataloged bottom features, such as a vent.
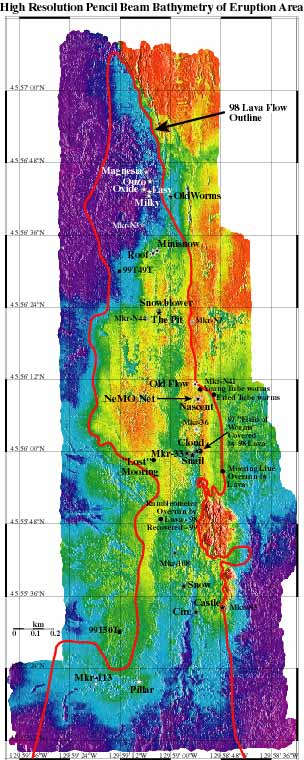
Setting up the system for ROPOS navigation goes something like this: Long-baseline
transponders are deployed at specific positions, creating an ocean floor
"satellite system" that triangulates the position of ROPOS. Transponders
are triggered by, and talk back with sound, and each has a unique frequency
that identifies it. They are strung on a 200-meter-long tether anchored
to the seafloor. Since we know the speed of sound in water, we use the
length of time the sound takes to travel through the water and convert
it into a distance, called a range. ROPOS is equipped with a relay transducer
that talks to, and listens to, the transponders. The time it takes for
the sound to travel from the transponders to the transducers is converted
into distance (range) and the navigation software triangulates these ranges
to determine the position of ROPOS within the net of transponders.
Location is not only important
for ROPOS. Samples taken from the ocean floor are all labeled with the
appropriate latitude and longitude. A great rock core does you absolutely
no good if you don't know where it came from. Most of the scientists on
board have a personal log book to record locations, times, and any other
pertinent information that will help in further analysis of NeMO data.
Six months down the road that log book is going to pay off.
Gotta go. There's only
a few cups of coffee left.
Jeff
|
|
Navigation
team (Susan Merle, Lisa Crowder and Julia Getsiv, l-r) pictured with one
of the long baseline transponders.

Soft coral on older lava
flows.
|
|