|
|
|
||||||||||||||
| Logbook: August 29,
2003
45°
51.8' N, 130° 00.2' W
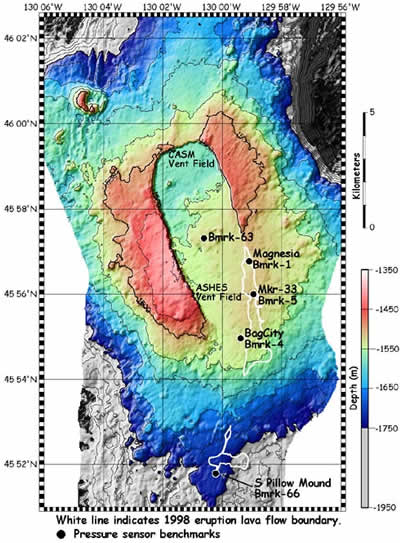
The first ROPOS dive at Axial began yesterday at 1300 PST. Two traverses from the Southern Pillow Mound to the center of the caldera are near completion. On each traverse pressure sensor readings at the 5 benchmarks have been completed. On the first traverse (south to north) the Ocean Bottom Hydrophone that was deployed before the dive was sighted near the Marker-33 benchmark. During the second traverse (north to south) one transponder was cut loose and recovered, a second could not be located. The third and final traverse (south to north) will begin shortly, to complete the pressure sensor readings at all benchmarks. Additional tasks on the third traverse include recovery and deployment of several temperature probes, as well as biological sampling in the Marker-33 Vent area. The dive is scheduled to end tomorrow morning. In the mean time, the PMEL engineers are preparing the NeMO Net buoy for deployment after the dive ends. |
||||||||||
|
Teacher's Report It's another beautiful day at sea. Because of my late watch last night, I woke up too late for the scheduled time of breakfast, but the Thompson is well prepared for 24 hour shifts. I grabbed some fruit and yogurt and ate on the foredeck, enjoying the calm seas and sunshine, while an albatross briefly kept me company. Yesterday it took over an hour for ROPOS to descend over 1700 meters to its dive location at South Pillow Mound on benchmark 66. After spending about 60 minutes to locate the benchmark and taking bottom pressure measurements, the cage (a garage of sorts for ROPOS) was raised to a depth of 1500 meters to prepare for ROPOS underwater transit to the next location, called "Bag City", near the southeastern edge of the caldera. The Thompson tows the empty cage with ROPOS traveling under its own power, connected to the cage by a tether. It takes less time to tow the cage underwater at 1.5 knots, than to raise and secure ROPOS and proceed at full steam to the next location. Even so, it took 4 hours to transit to Bag City, one of the previously identified vent sites of Axial.
Benchmarks were placed on the seafloor three years ago, at five different locations for a time-series experiment. By comparing measurements and observations over subsequent years, long-term changes can be documented. For example, bottom pressure measurements can determine whether the caldera floor is inflating or deflating. If magma moves in from below, then the caldera floor would rise slightly. This might mean that volcanic activity may increase in this area. Digital still frames and video records are utilized to record changes in biological activity at know vent sites. Increased biological activity is often associated with the increased venting of bacteria-enriched hot water. Near Benchmark 5 at Marker 33 Vent we recorded a vigorous colony of tubeworms that hadn't previously been observed. The shimmering water around the colony was thick with bacterial floc.
Using the digital camera, we were able to capture stunning close-ups of the tubeworms, and a myriad of smaller associated vent creatures as well. The plume (or gill) of the worm is bright red and complexly structured, comprised of tightly stacked sheets of divided filaments. The plume structure facilitates rapid and efficient exchange of dissolved molecules from the surrounding seawater. Locating the scattered benchmarks requires a combination of space age and deep sea technologies. The Thompson uses the GPS (Global Positioning Satellite) system to determine its exact longitude and latitude location. Transponders are placed on the seafloor at known locations to generate an acoustic signal that ROPOS can use for precise underwater orientation. However, transponders are powered by a series of D-cell batteries that need to be replaced periodically. Another mission accomplished today was to recover a transponder and replace its batteries for later deployment. |
||||||||||
| NeMO Home |About NeMO | Expeditions | NeMO Net | Explore | Dive! | Education |