
|
| |
||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
 The Mapping AUV being brought back aboard the ship after completing a mission to map the seafloor. (click image for larger view) |
We of the Mapping AUV (autonomous underwater vehicle) contingent have a bittersweet tale to tell. Sweet because the maps we got were spectacular, but bitter because our robot is broken in a way that we can’t fix out here at sea.
The Mapping AUV has been developed at MBARI (Monterey Bay Aquarium Research Institute) to map the seafloor with high frequency sound at higher resolution than can be achieved with hull-mounted or towed systems. This is possible because the AUV flies close to the bottom and has excellent navigation. The vehicle is autonomous, in that it is programmed ahead of time to fly a mission without intervention. It is launched over the side, tracked for a while to make sure everything is functioning properly, then left to complete the mission, come back to the surface, and wait for the ship to pick it up. Specifications, examples of maps, and other details of the AUV are at:
http://www.mbari.org/auv/mappingauv.
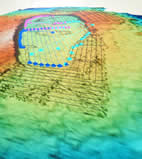
Last summer, we deployed the Mapping AUV here at Axial Volcano on an expedition with the NeMO group on the R/V Thompson. We mapped the east side of the caldera, northern rift zone, and northeast flank of the volcano. The resulting map is 1-meter resolution, and looks like the water was drained out of the ocean to expose fine details of the volcano. We found new hydrothermal vents based on the map; you can see individual lava pillars and the textures of lava flow channels, and distinguish the sequence in which lava flows erupted.
Our intention for this expedition was to finish the job. The MBARI team includes the entire AUV operations group, and two scientists from the Submarine Volcanism group and the institute’s seafloor mapping scientist to perform mission planning, data processing, and data interpretation.
Alternating with ROV Jason dives during the first few days here at Axial, we accomplished two 8.5 hour, 38 km long surveys each covering about 6 square km of the caldera floor. One more survey would have completed our map of the floor, and we would have moved on to map the flanks and rift zones. Unfortunately, a critical sensor, the Doppler Velocity Log (DVL), failed as the vehicle approached the seafloor at the beginning of the third survey. This sonar provides the vehicle with its altitude and speed over the bottom, and so is vital for maintaining the proper altitude and achieving precise navigation during a mission. In this case, the vehicle did not sense the approaching bottom as it dove, and it grazed the seafloor before we could abort the mission.
After the vehicle was recovered, we found that a leak had developed in the DVL’s pressure housing around one of the sonar transducers. These transducers are glued into the aluminum housing using an especially strong adhesive. This glue joint broke, and water got into the dry area inside. Only a few teaspoons of seawater entered the housing, but this was enough to ruin the DVL electronics. More importantly, we do not have a spare DVL housing on board, so we are finished with AUV operations for this expedition. Fortunately, no other damage to the vehicle or its systems occurred.
As frustrating as it is to be shut down at sea, this kind of adversity is a fact of life for Oceanographers, and all of us have experienced similar, or worse, difficulties before. The deep ocean is a harsh, unforgiving environment of high pressure, low temperature, and corrosive seawater that makes operating equipment a tenuous affair. You have to learn to look on the bright side of things: the navigation system of the AUV costs almost $200,000, and at least the end that was ruined will cost only $30,000 to replace.
We are now focusing on using our increased dive time with ROV Jason to ground-truth the high resolution maps and test hypotheses about the lava flow boundaries and eruption processes, and this effort is proving to be both highly successful and great fun.
|
Sep/Oct 2004
| ||||||
| S | M | T | W | T | F | S |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 23 | 24 | 25 | |
| 26 | 27 | 28 | 29 | 30 | 1 | 2 |
Today's Events:
Jason dive J2-291 at northern portion of 1998 lava flow.
RAS and BPR moorings.
|
Today's
photos |
|
click
caption for larger view |
 Axial Volcano's summit is viewed in 3D on a computer monitor. |
 Lava pillar in the 1998 lava flow. |
|
 |
| NeMO Home |About NeMO | Expeditions | NeMO Net | Explore | Dive! | Education |
