WHAT'S NEW:
BACKGROUND:
Mission
Project Description
Cruise Plans:
Participants
Technology (ROV, ships, etc.)
Future Plans
Results:
1998 NeMO Cruise
Axial 1998 "Eruption"
NeMO Future Plans
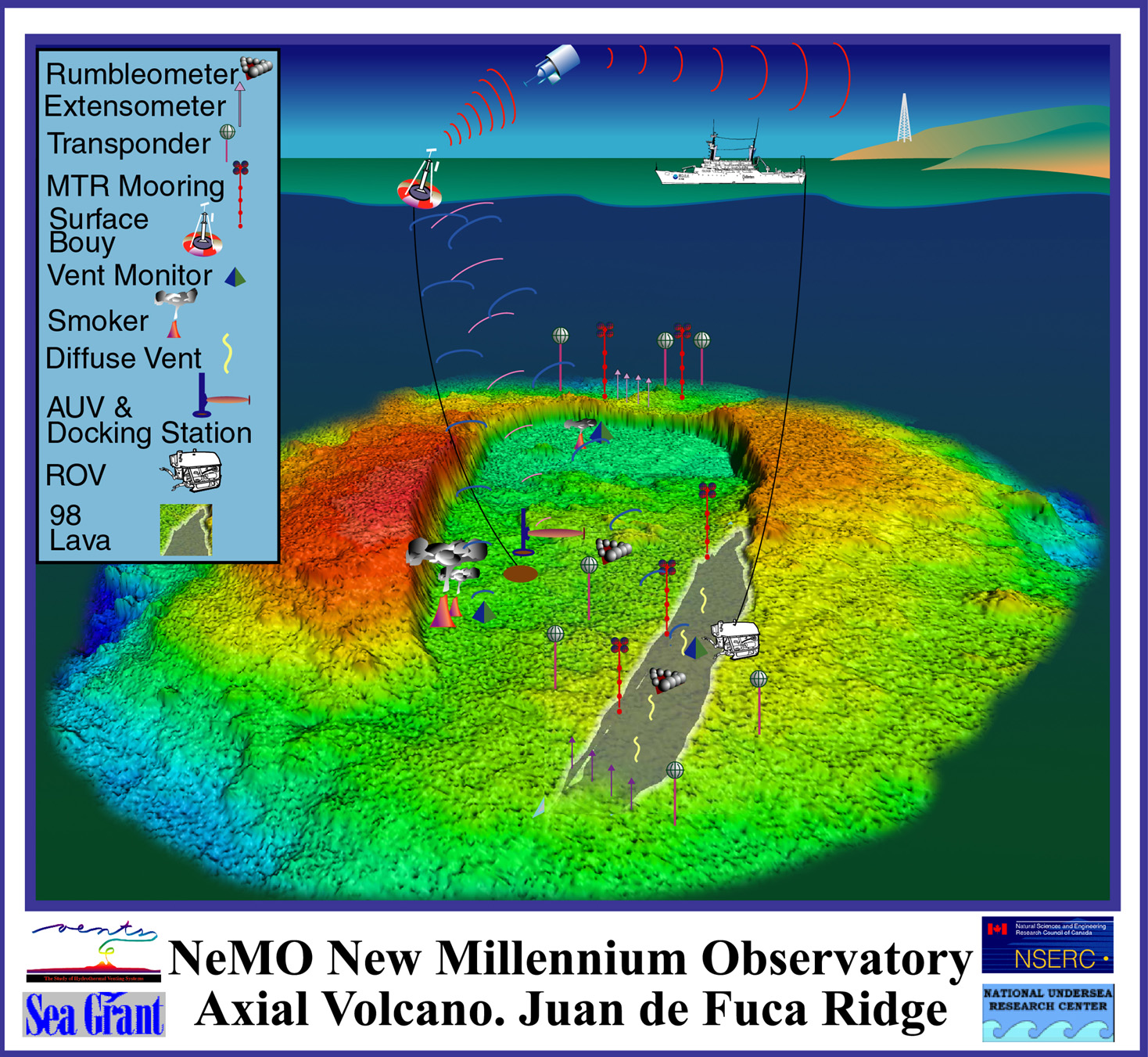
We are hoping to be able to greatly increase the number of seafloor instruments deployed at the NeMO observatory in the next several years. In particular, we hope to get funding to build a group of more advanced extensometer and rumbleometer instruments in order to build on the success that we've already had with these instruments.
The mooring and buoy that we will deploy at Axial in 1999, is a prototype for future systems that will be able to transmit data from instruments on the seafloor to shore, via acoustic modem and satellite links. Eventually we will even be able to send commands from shore to instrumentation on the seafloor.
Within a few years, an autonomous underwater vehicle (AUV) is planned to be deployed at Axial. Unlike ROVs which are tethered to a ship, AUVs operate without a ship nearby as they are unattached. They are small battery powered vehicles that can swim freely and carry out pre-determined missions with a suite of sensors.
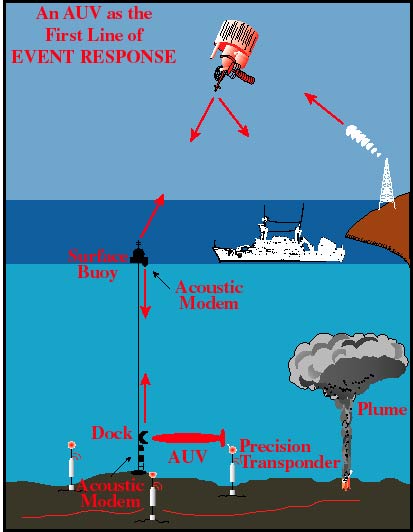 Some of the most dynamic changes caused by a seafloor volcanic eruption occur within
days to weeks after the event, often before a ship can be deployed. The goal for NeMO is to have an AUV stationed at Axial to act as a first response tool to an event and collect critical data.
The AUV will be docked most of the time at the base of a mooring attached to a surface buoy. Scientists will be able to communicate to a satellite
on the buoy to send instructions to the AUV via an acoustic modem on the instrument.
Some of the most dynamic changes caused by a seafloor volcanic eruption occur within
days to weeks after the event, often before a ship can be deployed. The goal for NeMO is to have an AUV stationed at Axial to act as a first response tool to an event and collect critical data.
The AUV will be docked most of the time at the base of a mooring attached to a surface buoy. Scientists will be able to communicate to a satellite
on the buoy to send instructions to the AUV via an acoustic modem on the instrument.
(click for full size)
For more information:
Credits/Contacts
oar.pmel.vents.webmaster@noaa.gov